| 2014.10.11 中部DMAT(災害派遣医療チーム)実務訓練に参加 |

大規模災害時に、被
害状況を即座に把握
しその対応が迅速に
行えるように、全国
各ブロックで頻繁に
実施されている訓練
が、上記日時に実施
された。 |

訓練本部は愛知県庁
内に設置され、警察、
消防、防災、自衛隊、
その他ボランティア組
織が、事前に計画さ
れた指示内容に沿っ
て行動をした。 |

私の所属する認定N
PO法人全日本ヘリ
コプター協議会は
、岐阜県美濃加茂
市の場外ヘリポート
からドクター2名を
要請された現場ま |

で搬送し、さらに飛行
中指示された被災地
の被害状況を現場上
空で撮影し、それを本
部に転送する作業を
実施いたしました。 |

飛行ルートは美濃加
茂、岐阜市、長島温泉
、飛島村、名古屋港、
衣浦港、日間賀島、
篠島、佐久島、蒲郡駅
でそれぞミッションをこ
なした。 |

ミッション終了後は、
空域が錯綜している
地域を通過するので
セントレアTCAサービ
スを要求し、他機の
情報を受けながら美
濃加茂場外に戻った。 |
|
ヘリコプターについて
一般の人は、ヘリコプターについてどういった印象を持っていますか? バタバタとやかましい音を立てて飛ぶ、垂直に離発着できる、ENGが止まったら墜落してしまうんじゃあないか等々、飛行機と違って低空を飛行するのでよく見かけますが、まじかで触れる機会は少ないでしょう。私の使用している機体は2人乗りで小さいですが高性能です。機動性に優れる反面、操縦は大変シビアです。車にたとえると小型高性能スポーツカーです。曲技こそ出来ませんが。それのまねごとくらいは簡単にこなします。と言っても、これはパイロットの知識と技量によりますが。
ここでは最初に書いたように、一般によく言われていることを簡単に説明しておきましょう。
バタバタとやかましい音を立てる。是はある一定の条件下で起こる現象で、高速、低角度での降下時及び旋回時に起きやすい。音の正体は、メインローターブレードの先端で発生する衝撃波が原因です。次に、垂直に離発着出来る利点は飛行機にはまねの出来ない物で、ヘリの大きな特徴になっています。しかし、通常このような離発着方法は採りません。それは、もし前進速度のない状態で離発着しているとき、低高度でENGが停止したらそのまま墜落することになります。しかしヘリコプターは一般に思われているようにENGが停止しても、高度が有る程度(この機体では前進速度がゼロの時には最低500ft必要になる)有るか、前進速度がそれぞれの機体によって定められている以上(この機体は最低60kt)有れば、安全に滑空して地上に降りることが出来ます。これはオートローテーションと言って、ローターの回転方向はENGが停止してもそのまま回転を続けます(ENGからの動力は途中ワンウエイクラッチを介して伝えられているためENGが停止しても回転は継続される)。ENGが停止すると機体は重力によって落下状態にはいるため、風がローターの下面から上面に通過し、一種の風車状態になりローターは回転を継続します、それが抵抗となってゆっくり(と言っても降下率は1500ft/minから2000ft/min)と降下し、パイロットは自分が目指す安全な場所(到達可能距離はENG停止時の高度による)まで操縦し、着陸することが可能になります。このような理由から、通常はヘリコプターでも飛行機と同じように安全速度に達するまでは出来るだけ低空を加速し、規定速度になってから上昇に移ります。 |
ヘリコプターの操縦方法:この説明を呼んで内容を理解できたらあなたもヘリを操縦できる! 鴨?
ホバリング
操縦には機体の姿勢を変化させる操縦桿(サイクリックスティック)と、メインローターのピッチ角を変化させる為のレバー(コレクティブピッチコントロールレバー、シート左側にある)と、ローター軸を中心に機体を左右方向に変化させる為のテイルローターコントロールペタルがあります。それぞれサイクリック、CP、ペタルと呼んでいます。
一般的に、飛行機よりも難しいと言われているようですが、私は飛行機は2度ほど操縦桿をさわらせてもらっただけで、詳しくは分かりませんけど、どんな物でも慣れるまでは難しいが、ある程度経験を積めば皆同じではないかと思っています。
ヘリの操縦で一番難しいとされているのは、ホバリングと言って空中でじっと停止していることです。ヘリは飛行機の主翼に当たる大きなローターを回転させて揚力を得ます。その為浮き上がるにはローターの迎え角を増加させなければいけませんが、そうする事によって機体には反トルクが増加しますから、それをうち消すために、テイルローターのピッチを増減させて機体が一定の方向を維持するように、ペタルをコントロールしながら空中に浮かびます。機体が地面から離れると同時にテイルローターで反トルクをうち消すためにペタルを作動させた事により、機体を右に押し進める現象が発生します(ローターを下から見て時計回りの機体の場合)。そこで是をうち消すために機体を少し左に傾けてバランスを取れば、見事空中に停止することが出来ます。口で言うのは簡単ですが、訓練を開始した人のほとんどがこの訓練で苦労します。 |
離 陸
ホバーに続いて離陸を開始するには、サイクリックスティック(操縦桿)をほんの少し倒すと機体は前進を始めます。この時、重力、揚力、推力、抗力、各モーメントのバランスが崩れ、とゆうよりもバランスを崩し(推力を増加させる)前進を始めますが、揚力がその分マイナスになるためCP(コレクティブピッチレバー)を上げることにより、ローターのピッチを増加させて揚力を補い、機体が沈下するの防ぎます。この時ピッチを上げると同時に反トルクが発生しますから、ペタルで機首方向を一定に成るよう修正します。ヘリはローターのピッチを変化させる度にペタルで機首方向のバランスを取る必要があります。
ここの状態を維持しつつ上昇速度60ktに成るまで加速していきますが、速度が10kt前後になってくると、前進することによりローターの回転面(ローターディスク)により多くの空気が流入し、ローターピッチを増加しなくても揚力が増大してくる。是を転移揚力と言います。そのため機体は頭を上げて高度を上げようとしますからから、そのエネルギーを前進速度の増速に使うためサイクリックで機体をさらに前傾させて加速していきます。 |
上 昇
離陸操作で60ktまで増速したら、ここからサイクリックの調整により60ktを維持して上昇に移ります。そのとき機体の前傾角度が離陸時に比べて浅くなるに伴いローターの迎え角が増える事になり、その分パワーが必要になるのでCPを調整して上昇パワーを維持します。 |
水平飛行
一定の上昇率で上昇し、水平飛行を希望する高度からそのときの上昇率の10%マイナスした高度(たとえば2000ftでレベルオフするとき、上昇率500ft/minの場合、この10%の50ftをマイナスした高度の1950ft)から水平飛行の諸元になるよう操作に入る。こうすることによって効率よくスムースに水平飛行及び巡航速度に移行できる。
水平飛行に入ってからは、そのときの飛行条件(気温、湿度、機体総重量、飛行速度、高度)に見合う釣り合いのとれたパワーに設定したら、後は釣り合いのモーメントを狂わせないようにじっとしていればヘリはそのまままっすぐに飛んでいける。しかしこの簡単そうなことが、初心者には大変難しく、パワーを一定にしておいても、速度を上げれば釣り合いのバランスが崩れて高度が下がり、逆の場合には高度が上がり出す。これが理解できないと、ついついパワーをいじってしまうからさあ大変、いつまでたっても高度、速度が定まらず30分も飛ぶと集中力もなくなり、さらに機体が暴れ出して助けてくれーと叫びだす人もいるくらいです |
旋 回
旋回はサイクリックスティックを左か右に傾け、自分がバンクさせたい角度になったらサイクリックをニュートラルに戻すことで機体は安定して旋回に入ります。しかし、旋回時にはクロスカップリングと言われる力が発生します。この機体のようにメインローターを下から見て時計回りの場合には、右旋回に入れて機体がロールを始め、希望するバンク角に落ち着くまで機首を下げようとする力が働き、逆の左旋回では機首を上げようとする力が働く。機首が上下に変化すれば、それに伴って速度も変化するため、ロールイン時には機首の位置を一定にするよう微妙なコントロールが要求される。 |
クロスカップリング
回転している物体に力を加えると、その力は加えられた位置から回転方向に90度進んだ位置で作用する(ジャイロプリセッション)。そのとき回転軸は作用した点の方向に傾こうとするジャイロモーメントが生じる。例えば、この機体が右旋回するとき、ローター回転面の左側を持ち上げるように力が働き、そこからさらに90度回転した箇所でもジャイロプリセッションによって回転面後方を持ち上げようとするから、回転軸は旋回前に比べて前傾する方向に力が働きます。そのため機首が下を向くことになり、結果として高度が下がる。このようにヘリコプターはローターという大きな羽を回転させて飛行しているので、旋回、上昇等どれか一つの操作を行うと、それによって他の軸廻りの機体運動が発生します。これがクロスカップリングといわれ、ヘリコプターの操縦が難しいと言われる所以です。発生状況は機体の形状や構造によってまちまちです.
|
オートローテーション
飛行中にENGが停止してしまった場合、機体が落下し始めますが、その時にローターの下面から上面に空気が流れる空気力によって、ローターは回転を継続し、降下率ははじめに書いたように多くなるが、安全に着陸することが可能になります。ただし、一発勝負ですから、安全に着陸できる場所を瞬時に選定し、そこに向かって正確に機体をコントロール出来る能力を得ることが必要です。
オートローテーションには、ストレート、180度、360度、バック、垂直と大きく分けると5種類の方法があります。ENG停止か
ら着陸場所までの飛行コースによって使い分け、又は、組み合わせて使います。
航空機は通常風に向かって離陸、着陸をするのが基本です。これはほとんどの方が知っているように、航空機の速度は対気速度で表されます。そのため、無風の時に80ktで飛行している航空機の、地面に対する速度(対地速度)も80ktですが、向かい風が10ktの時の対地速度は70ktと遅くなります。逆に、追い風の場合には90ktと早くなります。安全に着陸するためには、対地速度が遅い方が断然有利です。そこで、着陸時には風に対するのが基本となります。
|
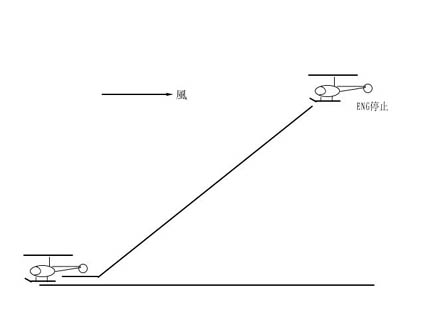
ストレートオートローテーション
ENGが停止したときに、着陸地が飛行方向正面にあり、風も向かい風の場合にはこの方法を選択します。
 |
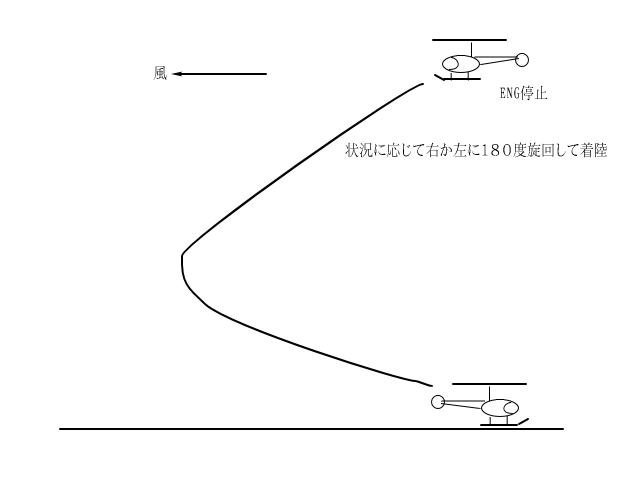
180度(ワンエイティー)オートローテーション
背風で飛行していたときにENGが停止した時、着陸地が横方向にしか無い場合にはこの方法を選択し180度旋回して着陸します。
 |
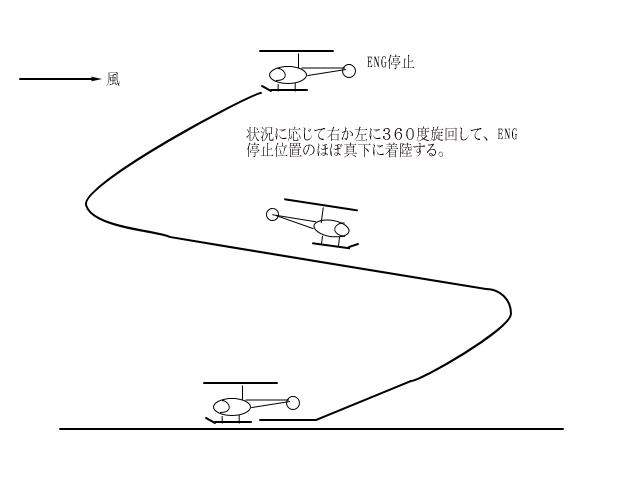
360度(スリーシクスティー)オートローテーション
向かい風で飛行中にENGが停止したとき、真下にしか着陸場所が無い場合にはこの方法を選択し、360度旋回して着陸します。
 |
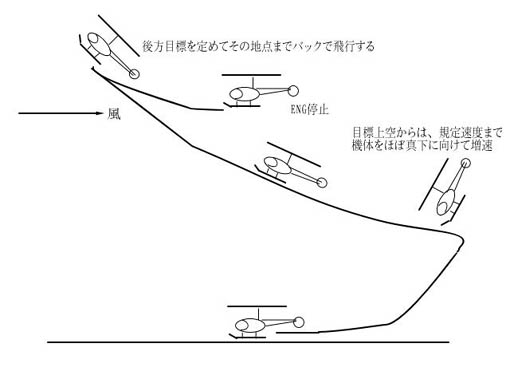
バックオートローテーション
切り立った山間とか、日本では無いかもしれませんが、高層ビルの谷間を飛行中にENGが停止したら、上記の飛行方法で
は対処出来ないので、この方法又は後述する垂直オートローテーションを選択します。
ENGが停止したら、最初に速度を殺しつつ機体を45度程まで頭上げの姿勢にする。しばらくして機体はその姿勢のままで停止し、すぐに降下に移行します。その後、徐々に機体を水平に戻しながら、着陸予定地までの距離と高度を判断し、そこまで後進飛行を続けながら目標地まで来たら,機首を下向きに突っ込んで各機体の推奨速度まで加速します。(我々の機体は速度60kt) 速度ゼロから推奨速度を自由落下で得るには最低500ft必要。推奨速度に達する頃には地面間近になっているから,その後CPレバーでローター回転数が規定以上の回転数にならないよう調整してフレアー操作に入り、前進速度がほぼゼロになったら機体を水平にして軟着陸をする。
 |
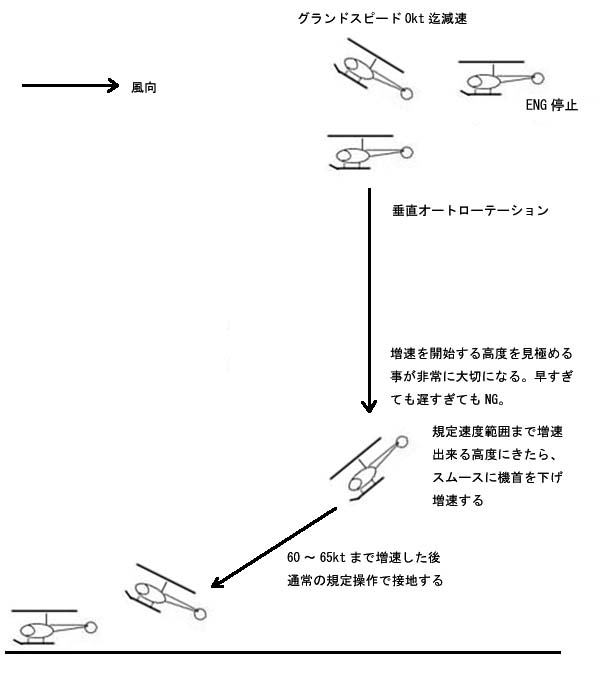
垂直オートローテーション
ENG停止位置がストレートでは近すぎる、かといって360度では遠すぎるときにこの方法でオートローテーションを完成させる。
この操作が自在に出来るようになると、オートローテーションで設定目標範囲に持って行くのが非常に楽(近い場合)になる。
ENG停止は,どの地点で発生するか誰も判らない。上記の訓練がきれいに出来るようになっても、決めた目標にぴたりと接
地させるには、ENG停止後速やかに65ktに設定した時、“フレアー開始ポイントをどこにとるか”、が重要な鍵になる。も
し目標が近すぎる場合には、それに応じた減速をし、タイミングを見て規定速度まで戻して滑空距離を調整する事が出来
る。
 |
変則オートローテーション
この操作は、上記の各操作方法を状況に応じて組み合わせ、正確に目標地点まで機体を持って行くようにすることが出来ます。 |
























{kind=link}